Gregorio Marchesini
Royal Intitute of Technology, Stockholm, Sweden

KTH,
EECS
Dep. of Intelligent Systems
Decision and Control Systems
Malvinas Väg 10, Floor 6
SE-100 44 Stockholm, Sweden
I am a Ph.D student at the division of Decision and Control Systems (DCS) at KTH Royal Institute of Techonolgy, Stockholm, Sweden. I am supervised by Prof. Dimos V. Dimarogonas (KTH) and Prof. Lars Lindemann (USC)
Mostly guided by a strong passion for mathematics and its application in robotics systems, my main research interests are in formal methods for multi-agent systems planning and control, graph theory, predictive control and robotics. During my PhD I will develop solutions for multi-agent planning and control under signal temporal logic tasks and sensing constraints. I am currently associated with the SymAware European project. In a world that is more and more pervaded by robotic systems, I wish to contribute in developing more reliable and risk-aware autonomous systems with concrete applications toward a more sustainable future.
… That you are here—that life exists and identity,
That the powerful play goes on, and you may contribute a verse.
Walt Whitman
news
| Jun 10, 2025 | Our latest publication “Sampling-Based Planning Under STL Specifications: A Forward Invariance Approach” is now available. You can have a look here |
|---|---|
| Apr 10, 2025 | Our latest publication “A Communication Consistent Approach to Signal Temporal Logic Task Decomposition in Multi-Agent Systems” is now available. You can have a look here |
latest posts
| Jun 06, 2025 | When acting is a legacy for future generations |
|---|---|
| May 04, 2025 | Tricks for faster MPC in Casadi |
selected publications
-
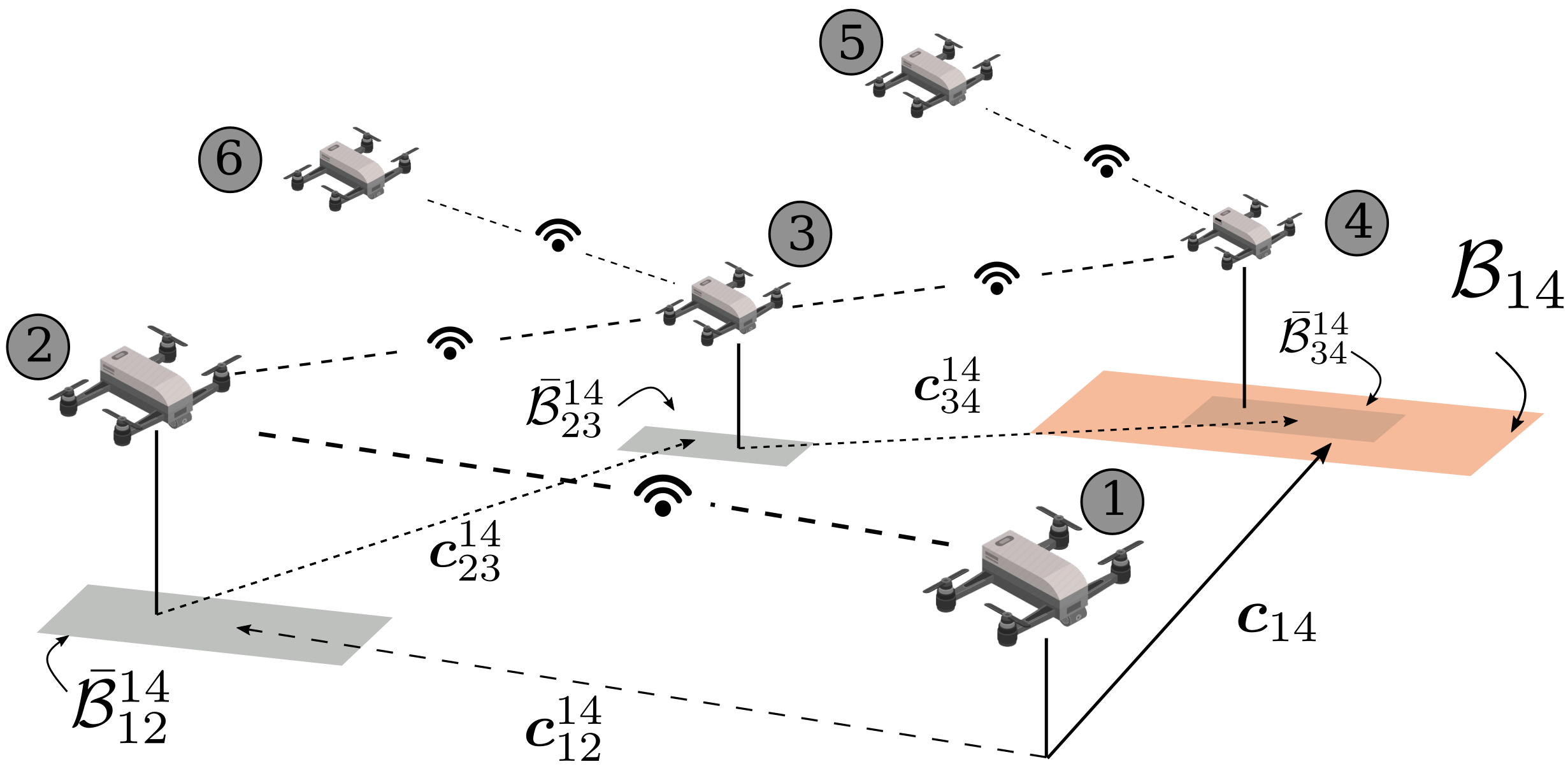 A Communication Consistent Approach to Signal Temporal Logic Task Decomposition in Multi-Agent Systems2024
A Communication Consistent Approach to Signal Temporal Logic Task Decomposition in Multi-Agent Systems2024 -
 Decentralized Control of Multi-Agent Systems Under Acyclic Spatio-Temporal Task Dependencies2024
Decentralized Control of Multi-Agent Systems Under Acyclic Spatio-Temporal Task Dependencies2024